每次吃完飯�����,看著堆積如山的油膩膩的待洗碗碟��,雜亂的水槽��,你是否有一點點生無可戀呢���?然而美國現代家庭研究協會近日發表的一項報告顯示����:洗碗是最糟糕的家務活���!原來不是91香蕉视频官网不熱愛生活���,抱怨洗碗麻煩��,而是洗碗真的體驗感超級差�����!
眾所周知��,機器人最適合的工作類型便是人類不能幹的或者不想幹的���,在一定領域��,工業機器人已經完全有能力替代人工作業����,將人類從一些沉悶���、肮髒��、危險的地方解救出來��。
在這個爭分奪秒打拚的時代��,有數據研究表明電飯煲的發明可以使得您每天節約1小時���,洗衣機的發明可以使得您每天節約2小時���,洗碗機的誕生可以使得您每天節約3.5小時���。

目前市場上已經有洗碗機存在��,基本偏向於小型化��,適合家用��,可能您的家裏就有一台����,它在給您提供便利快捷的同時��,您有沒有思考過這樣一個問題����,您家一台洗碗機���,需要一個人操作���,可是如果一個可以容納5000人同時就餐的餐廳���,需要多少台這樣的洗碗機����,需要多少操作員���?
家用洗碗機裝不了足夠的髒盤子���,而且消耗時間長���,這使得它們無法在餐廳的廚房裏使用���。美國一家名為Dishcraft Robotics的初創公司宣布推出一種新的機器人洗碗係統��,旨在最大限度地減少人類洗碗的時間和精力���。
據統計����,目前大型餐館大約30%的洗碗工作多到無法完成���,餐館正麵臨洗碗人員短缺的問題���,Dishcraft創始人認為洗碗是一項低成本的工作���,機器人可以填補這個空白����。並且機器人能做得更幹淨�����、更快����、更好和成本更低����。
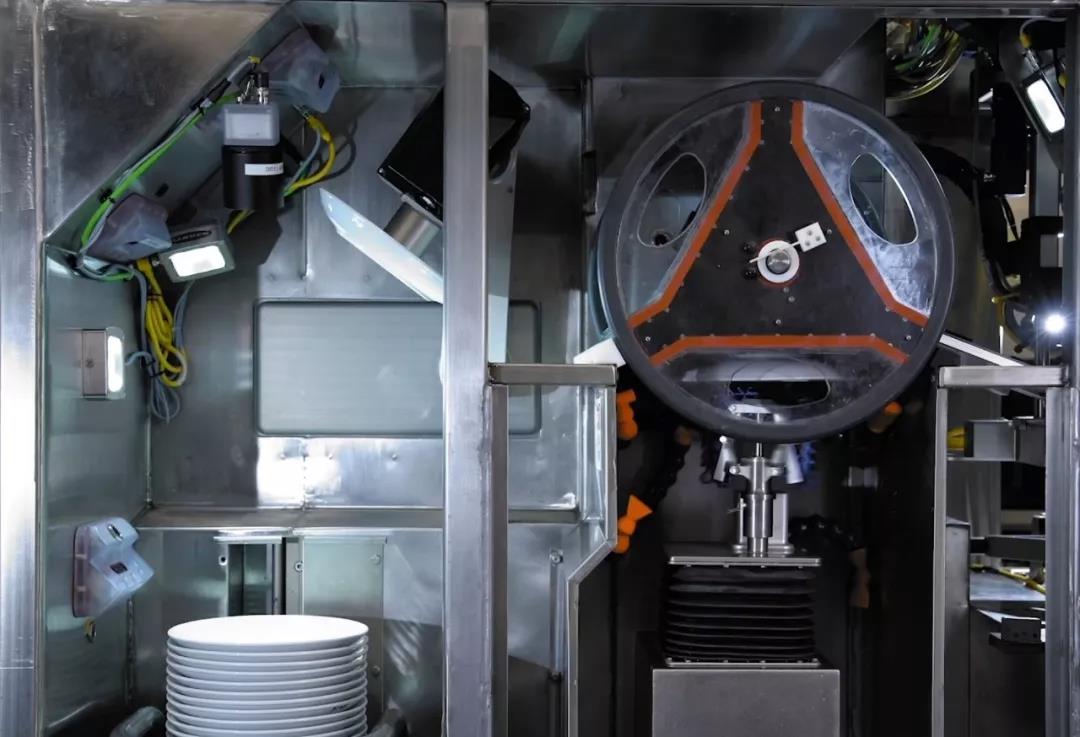
DishcraftRobotics的洗碗係統使用旋轉的洗滌器頭分別清洗每個盤子���,然後使用計算機視覺在不到一秒鍾的時間內檢查每個盤子有沒有剩餘的食物殘渣���,以達到標準的質量水平��。需要清洗的餐盤會事先放進推車裏���,一旦推車被推入Dishcraft係統�����,你會發現有一個機器人手臂����,每次拿起一個盤子並將它移動到清潔的地方���。手臂沒有使用抽吸結構���,這些餐具都是定製的����,底部裝有一些鋼材���,以便可以磁力拾取����。
該係統結合了兩種人工智能����,物理模擬以及深度學習���。物理模擬可以模擬物體的運動���,但是你必須為每一個特定的場景編程����。而深度學習你可以給神經網絡提供一些視覺圖像和物理學���,係統將通過學習從而去分析那些它之前並未接觸過的環境����。通過3D攝像頭來構建數據模型��。這些模型將判斷物體的行為��,行動的速度等����。最終這些數據將被投入到深度神經網絡中���,通過大量的數據分析���,它將能識別出物體���,判斷它們的結構��,並最終預測它們的行為����。
“它們將不像工業化機器人那樣一遍一遍很精細地重複動作�����。這個洗碗係統能夠處理不確定的事情���。如果需要清洗的盤子不是很整體的放在推車裏��,它需要理解盤子擺放的細節����;否則將會打碎它們����。”研發人員覺得這將成為創造一種全新的機器人的基礎���,這些機器人可以像人類一樣能對環境有比較本能的反應��。
當然���,要想百分百的預測準確是不可能的����,即使是人類也不可能做到��。研發團隊甚至還將該係統和人類在預測將要發生的事的準確率做了一個比較�����,發現人工智能完全能與人類媲美���。就平均表現來說��,這個係統和人類很像��。
除了識別之外���,讓機器人擦洗盤子還有一個非常具有挑戰性的問題�����,機器人需要抓住各種非常光滑的盤子��,然後需要靈巧的操縱他們��, Dishcraft團隊創新性的讓每個盤子都可以用單獨的旋轉洗滌器頭進行單獨清潔����,該洗滌器頭專門設計用於係統所期望的各種形狀的餐盤���。
在盤子被擦洗之後���,它被旋轉120度���,在那裏由視覺係統檢查清潔度����。如果失敗���,它隻是旋轉回來再次清潔���,但如果它通過���,它會被放入廚房標準的碟架����,滑出係統��。從那裏��,架子進入消毒劑(大多數商業廚房已經有)用於最後的清潔步驟���。
雖然Dishcraft robot並不適用於現在的小型廚房��,但是他們可以給大型餐館提供更優質的服務���,徹底的顛覆傳統的清洗行業���,相信隨著Dishcraft技術的革新�����,通過機器人係統以可靠及低成本的方式來解決盤子清洗這一難題是有希望的����!
文章來源���:互聯網���,91香蕉视频官网機器人http://www.qzyywl.com整理發布