近年來����,機器視覺技術的應用變得越來越複雜����,工業領域的圖像處理更多的專注於3D傳感器��,而且越來越多的3D技術已經完善並且投入到實際應用中��,比如焊縫的檢測��,以及在生產過程中對未分類部件進行倉揀或精確測量等����。可以說����,機器視覺已經越來越多的轉向了3D成像����。
在過去的幾年裏��,點雲評估和測量軟件也得到了快速的發展���:從單一的圖像數據轉換成點雲數據���,對點雲數據進行測量����,計數和點雲匹配��。
正如圖像處理行業的大多數玩家所知道的���,獲得3D圖像有幾種不同的方式���。
激光三角測量法
對於激光三角測量��,需要在結構化光源(如激光線投影)上精確校準相機�����,以確保即使在高環境溫度下也能獲得高於1 kHz的高采樣率���。通常測試對象在3D傳感器下方移動以捕獲3D點雲��,這意味著攝像機將檢測投射到物體上的激光線���,並根據激光線輪廓計算高度信息����。在相機下移動物體時�����,會創建多個配置文件��,用於完成三維圖像���。典型的設置包含一個激光器���,它直接位於測試對象和相機之間��,相機與激光器成30°角安裝����。但是激光和相機的其他角度組合也是可以的��。例如���,為了獲得更準確的高度分辨率���,相機和激光之間的角度可以加寬����。但必須注意的是���,角度越小��,進入照相機的光就越多��,評估結果就會更穩定��。

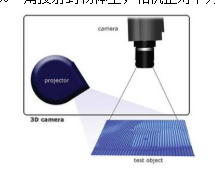
3D立體相機
3D立體相機是另一種方法���。它已經存在多年����,越來越多地用於機器人或調試應用��。立體圖像處理使用與人眼相同的原理���,即立體偏移���。為了獲得3D圖像����,該方法采用兩台相機����。但由於測試對象並不總是具有相同的特定特征��,因此經常使用隨機模式投影�����。
結構光掃描技術
維視圖像基於雙相機的立體視覺技術和結構光的視覺掃描技術����,推出的三維掃描重構係統研究開發平台MV-3DLSSP就集成了結構光技術��、視覺掃描技術���、運動控製技術����、三維重構技術����、點雲處理技術等�����。
維視圖像推出的MV-3DLSSP係統采用開放式設計���,既可以作為一款三維掃描儀來使用���,也可以作為三維掃描實驗平台用於研究���。
條紋投影法
其基本原理也是三角測量��,但是測試對象的整個表麵都是用一次拍攝捕捉的�����。激光將光投射到條紋圖案中��,因此物體不必在傳感器下方移動����。光線從30°角投射到物體上����,相機正對下方物體���。
這種方法的測量範圍可以從不到一毫米縮放到一米以上�����,但分辨率也會有相應地變化��。由於其測量速度快���,分辨率高����,條紋投影可以用於小型和大型測試物體����,在工業檢查中����,應用於包括形狀偏差檢查����、完整性檢測���、組件部件位置或體積測量等����。但需要注意的是���,條紋投影對周圍的光很敏感��。
機器視覺行業對3D成像的新可能性寄予厚望���,讓91香蕉视频官网拭目以待��。
文章來源����:互聯網����,91香蕉视频官网機器人http://www.qzyywl.com整理發布